
Na robótica, um efeito final é um dispositivo ou ferramenta que está ligado à extremidade de um braço do robô onde a mão estaria. O efeito final é a parte do robô que interage com o ambiente. A estrutura de um effector final e a natureza da programação e hardware que o impulsiona dependem da tarefa que o robô estará executando.
Na manufatura, um braço de robô pode acomodar apenas certas tarefas sem alterações no hardware auxiliar do seu effector final e/ou programação. Se um robô precisa pegar algo, um tipo de robô mão chamado de garra é o effector final mais funcional. No entanto, se um robô precisa ser capaz de apertar parafusos, então o robô deve ser equipado com um efeito final que possa girar.
Efeitos finais usados na fabricação incluem:
- anti-collision sensors
- brushes
- cameras
- cutting tools
- drills
- grippers
- magnets
- sanders
- screw drivers
- spray guns
- vacuum cups
- welding guns
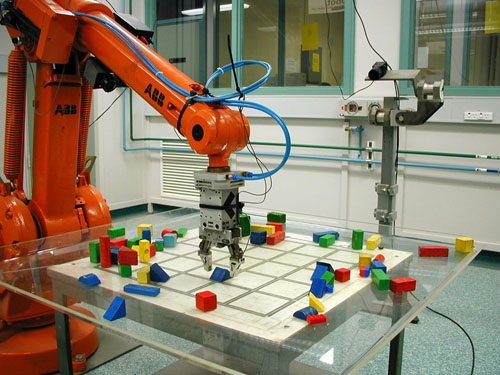
The end effector on this ABB industrial robot is called a gripper.
Also see eye-in-hand system and motion plan.